Für uns stehen die 35MHz, 40MHz und 2,4GHz zur verfügung.
Da ich einen 35MHz Sender habe wollte ich dafür auch gerne einen passenden Empfänger haben. Leider sind diese durch Gewicht, Größe und deren Antennenlänge ungeeignet. Das selbe gilt für die 40MHz Empfänger. Die aktuellen 2,4GHz Systeme sind doch eher teuer und meistens auch zu groß und/oder zu schwer. Jedoch haben wir doch was ausfindig machen können, dazu später mehr.
Da wir zuerst nichts Passendes parat hatten und wir ja sowieso zwei TandemZ's von Silverlit ausgeschlachtet hatten, kam Harald auf die super Idee die dort verbauten IR-Empfänger zu verwenden.

Dieser ist dem TSOP mit 38kHz von Visey sehr ähnlich. Allerding nur ähnlich, zumindestens das Pinout ist etwas anders. Dieser Sensor kann "natürliches" infrarotes Licht von einem künstlich erzeugtem unterscheiden. Das Künstliche wird einfach mit einer Frequenz von 38kHz gepulst, sprich immer Ein und Aus geschaltet. Der Sensor erkennt dieses gepulste infrarote Licht und schaltet seinen Ausgang auf Low (GND). Allerding kann man den Sensor nicht ständig mit dem Signal "befeuern", irgendwann geht er in Sättigung und macht nichts mehr. Darum müssen gewisse Pausen eingehalten werden. Wir erzeugen aus dem PPM-Summensignal des Senders über eine von Harald entworfenen Schaltung das 38kHz Signal. Dies ist das selbe wie das PPM Signal, nur aufgrund der Pausezeiten die wir einhalten müssen wird nur jedes zweite Signal ausgestrahlt.

Eigentümer des Bildes ist Harald Sattler
Dies System funktioniert nach ersten Schwierigkeiten erstaunlich gut!
Allerdingt ist es wirklich nur fürs Wohnzimmer mit direktem Sichtkontakt und kurzer Reichweite gedacht, größere Hallen oder draußen geht garnicht oder nur sehr sehr schlecht.
Da wir aber auch diese Bereiche und vorallem eine höhere Reichweite erreichen wollen haben wir uns weiter umgesehen. Nach ein wenig suchen sind wir auf den Coral-D von MicroInvent gestoßen.
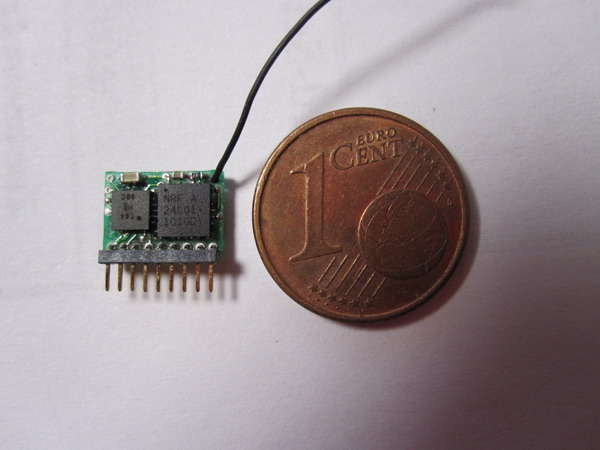
Eigentümer des Bildes ist Harald Sattler
Dieser winzige 2,4GHz Empfänger hat ein Maß von 9 x 6mm und laut Hersteller wiegt er 0,3 Gramm.
Da dieser leider kein PPM oder digitales Protokoll ausgibt hatte Harald Kontakt mit dem Herstellen aufgenommen und er war tatsächlich so nett und hat ein digitales Protokoll einprogrammiert.
Da Harald an diesem Empfänger interessiert war hat er dafür dann die NanoQuad Firmware so umprogrammiert das dieser Empfänger damit ausgelesen werden konnte.
Und was soll ich sagen... es funktioniert ausgezeichnet!!!
Ich selbst habe mich für das günstigere 2,4GHz SuperMicro Set von Hobbyking.de entschieden.

Auf der Website steht das er ein 5 Kanal Empfänger ist. Leider sagt die Anleitung und auch mein Oszi das gegenteil! Es handelt sich lediglich um einen 4 Kanal Empfänger. Ich könnte zwar den Modus-Schalter (CH5) durch Steuerknüppelstellungen ersetzen und die Kanäle nicht übers Summensignal sondern die einzelnt auswerten aber um erlich zu sein möchte ich das garnicht.
Naja also heist es wieder nach Alternativen suchen.
Da schon des öfteren der Wunsch nach Spektrumkompatibilität geäußert wurde, habe ich mich in der Richtung "umgehört" und tatsächlich etwas gefunden. Den kleinen 2,4GHz DSM2 Deltang Empfänger Rx31 von Deltang.co.uk gefunden.

Eigentümer des Bildes ist www.deltang.co.uk
Er hat laut Hersteller die Maße 9,3 x 9,9mm und soll 0,23 Gramm wiegen.
Zudem ist dieser zu den Spektrumsendern kompatibel und gibt uns die Infos über 7 Kanäle über das PPM-Summensignal aus. Optional hätten wir auchnoch einen Ausgang um die Daten Seriel auszulesen.
Zudem bietet Deltang noch einen zum Sender umgebauten Spektrumempfänger an, den Tx1.
Da Harald und ich keinen Spektrumsender haben, werden wir diesen mitbestellen.
Laut dem Hersteller hat man mit dieser Kombi eine Reichweite von 100 Meter bei Sichtkontakt. Wer da noch den NanoQuad steuern kann muss Adleraugen haben.
Sicherlich werden sich nun einige fragen warum sich Harald auch diese Kombi ordert, er hat ja den Coral...
Nunja die Spektrumkompatibilität ist sehr gefragt und zudem ist die Kombi um einiges erschwinglicher als die des Coral's.





